强实时运动控制内核MotionRT750(四):高速贴装应用中的拱形运动
强及时活动节制内核MotionRT750
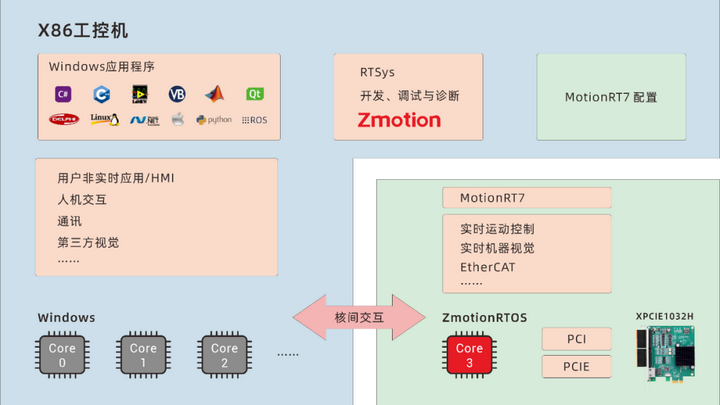
MotionRT750是正活动手艺尾家自立自研的x86架构Windows零碎或Linux零碎下独有肯定CPU的强及时活动节制内核。
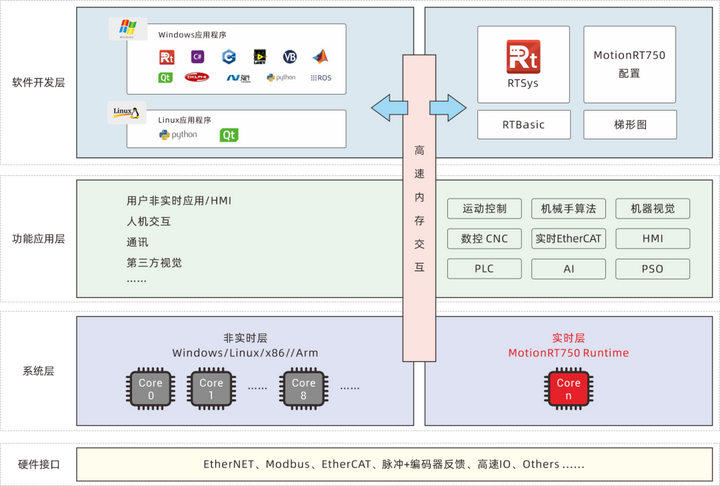
该计划采取独有肯定CPU内核手艺完成超强功能的强及时活动节制。它将中心的活动节制、机械人算法、数控(CNC)及机械视觉等强及时的义务,集合运转正在1-2个公用CPU核上。取此同时,其他CPU核则专注于处置Windows/Linux相干的非及时义务。
另外散成MotionRT750 Runtime及时层取操纵零碎非及时层,并应用下速同享内存停止数据交互,明显晋升了活动节制取下层使用间的通讯效力及函数履行速率,终究完成更波动、更下效的智能配备节制,确保了活动节制义务的相对及时性取零碎波动性,特殊合用于半导体、电子配备等下速下粗的使用场所。
MotionRT750使用劣势:
1.跨仄台兼容性:撑持Windows/Linux零碎,适配分歧品级CPU。
2.开辟灵敏性:供给多言语编程接心,便于两次开辟取功用定造。
3.及时性晋升:经过CPU内核独有机造取下效LOCAL接心,完成2-3μs指令交互周期,较传统PCI/PCIe计划提速远20倍。
4.扩大才能强化:多卡多EtherCAT通讲架构撑持254轴活动节制及500μsEtherCAT周期。
5.零碎波动性:32轴125μsEtherCAT冗余架构消弭单面毛病风险,保证延续消费。
6.平安牢靠性:没有惧Windows零碎解体影响,蓝屏时仍可保持慢停取平安停机功用无效,确保产线平安运转。
7.功用扩大性:及时内核撑持C言语顺序开辟,便利功用拓展取及时代码晋升效力。
更多闭于MotionRT750的概况引见取运用面击→强及时活动节制内核MotionRT750(一):驱动装置、内核设置装备摆设取运用。
超及时EtherCAT活动节制卡XPCIE6032H
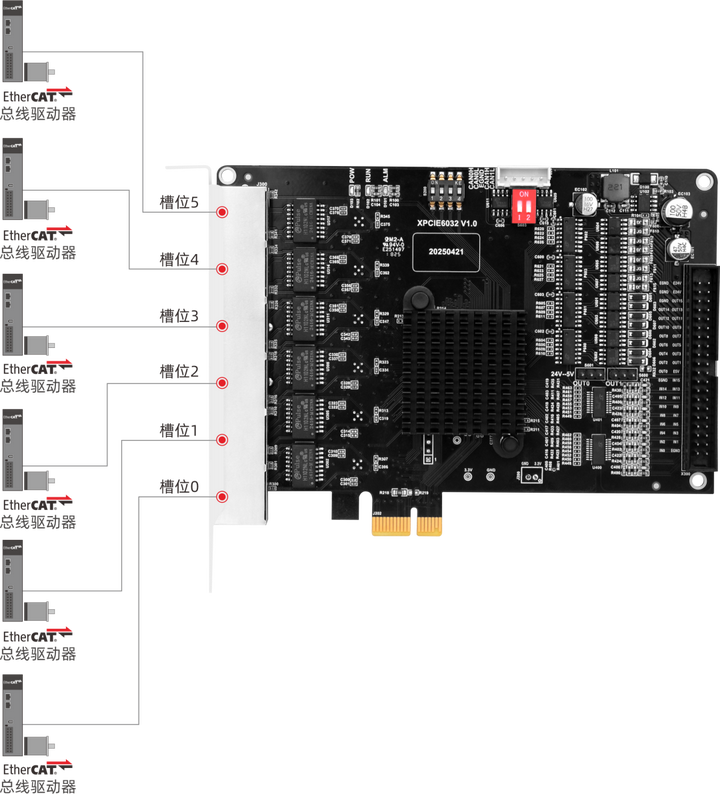
XPCIE6032H活动节制卡散成6路自力EtherCAT主站接心。整卡最下可撑持254轴活动节制;125usEtherCAT通信周期时,两个端心设置装备摆设冗余最下可撑持32轴活动节制。6个EtherCAT主站各通讲自力任务,多EtherCAT主站互没有影响。
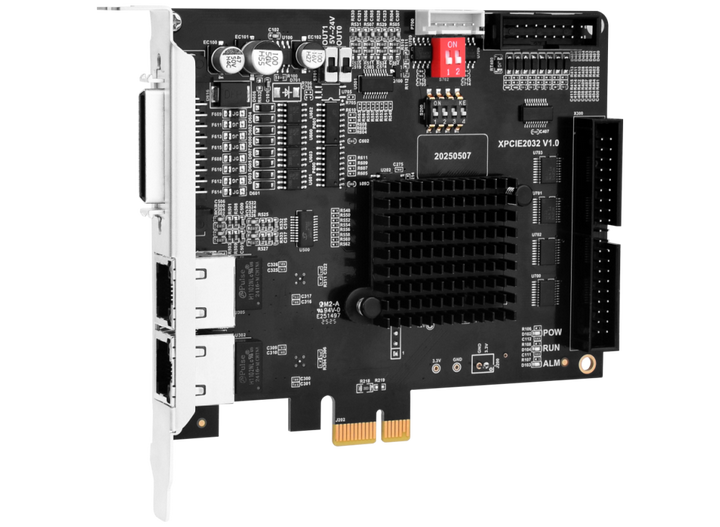
另外,关于EtherCAT接心数目需供没有下的客户,我们也有衍死型号XPCIE2032H可选。同系列产物XPCIE2032H散成2路自力EtherCAT接心。整卡最下可撑持至254轴活动节制;125usEtherCAT通信周期时,单接心最下可撑持32轴活动节制。2个EtherCAT主站各通讲自力任务,多EtherCAT主站互没有影响。
XPCIE6032H活动节制卡里背半导体装备、精细3C电子、死物医疗仪器、新动力配备、人形机械人及激光减工等下速下粗场景,为固晶机、揭片机、分选机、锂电切叠一体机、下速同形插件装备等主动扮装备供给中心活动节制撑持。
XPCIE6032H硬件特征:
1.EtherCAT通信周期可到125us(需求主机功能取及时性充足)。
2.板卡散成6路自力的EtherCAT主站接心,最多可撑持254轴活动节制。
3.拆载活动节制及时内核MotionRT750。
4.相较于传统的PCI/PCIe、网心等通信体例,速率可晋升了10-100倍以上。
5.板载16路下速输出,16路下速输入。
6.板载4路下速锁存、4路硬件地位比拟输入、4路通用PWM输入。
XPCIE6032H视频引见可面击→“齐球初创!PCIe 6路下功能EtherCAT活动节制卡XPCIE6032H_哔哩哔哩_bilibili”检查。
更多闭于XPCIE6032H的概况引见取运用面击→齐球初创!PCIe超及时6通讲EtherCAT活动节制卡上市!。
PCIe EtherCAT及时活动节制卡XPCIE1032H
XPCIE1032H是一款基于PCI Express的EtherCAT总线活动节制卡,可选6-64轴活动节制,撑持多路下速数字输出输入,可沉紧完成多轴同步节制战下速数据传输。
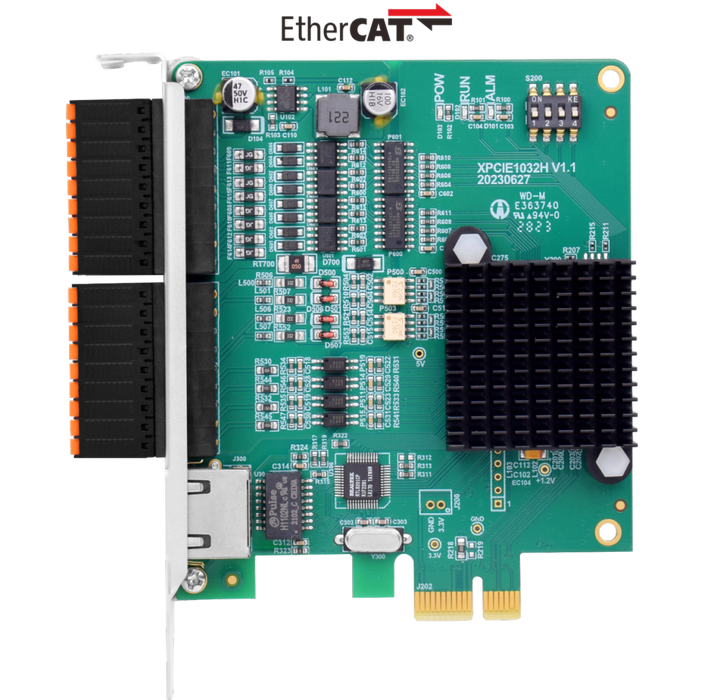
XPCIE1032H活动节制卡散成了弱小的活动节制功用,连系MotionRT7活动节制及时硬核,处理了下速下粗使用中,PC Windows开辟的非及时痛面,指令交互速率比传统的PCI/PCIe快10倍。
XPCIE1032H硬件特征:
1.6-64轴EtherCAT总线+脉冲可选,此中4路单端500KHz脉冲输入。
2.16轴EtherCAT同步周期500us,撑持多卡联动。
3.板载16面通用输出,16面通用输入,此中8路下速输出战16路下速输入。
4.经过EtherCAT总线,可扩大到512个断绝输出或输入心。
5.撑持PWM输入、粗准输入、PSO硬件地位比拟输入、视觉飞拍等。
6.撑持曲线插补、圆弧插补、延续轨迹减工(速率前瞻)。
7.撑持电子凸轮、电子齿轮、地位锁存、同步追随、实拟轴、螺距抵偿等功用。
8.撑持30+机器脚模子正顺解模子算法,比方SCARA、Delta、UVW、4轴/5轴 RTCP...
XPCIe1032H视频引见可面击→“下功能PCIe EtherCAT活动节制卡 | XPCIE1032H_哔哩哔哩_bilibili”检查。
更多闭于XPCIE1032H概况面击“没有行10倍提速!PCIe EtherCAT及时活动节制卡XPCIE1032H 等您评测!”检查。
PCI Express及时活动节制卡XPCIE1028
PCI Express®总线活动节制卡XPCIE1028,具有地位锁存、多维下速硬件地位比拟输入PSO、同步追随、粗准触收的活动节制战I/O节制功用。共同正活动手艺MotionRT7及时内核运用,可下度知足下速视觉挑选机使用所需的活动节制需供。
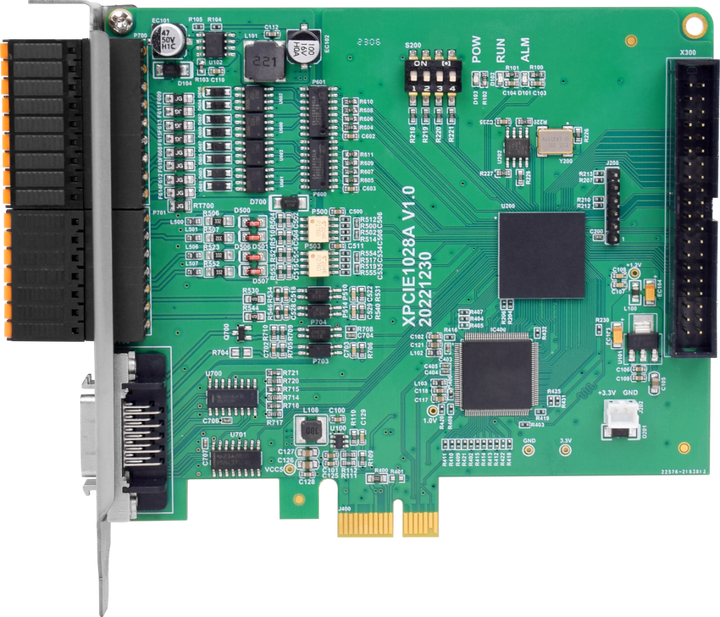
XPCIE1028活动节制卡是正活动手艺专为下速视觉挑选装备设想的一款PCI Express®总线活动节制卡,内置丰厚的I/O、通信接心,能够沉紧天完成取视觉挑选机通讯,十分婚配运用于1-12个相机+多个下速吹气心的齐主动CCD光教挑选机等装备上运用。
 下速视觉挑选装备表示图
下速视觉挑选装备表示图
XPCIE1028自带8路下速输出战多达16路下速硬件地位比拟输入,可以沉紧完成视觉飞拍战下速、粗准触收节制等视觉挑选机所需的多种及时性活动节制,和下波动性。脉冲输入+编码器反应,可完成转盘的扭转,并及时记载编码器的及时反应地位,帮您愈加粗准天节制装备。
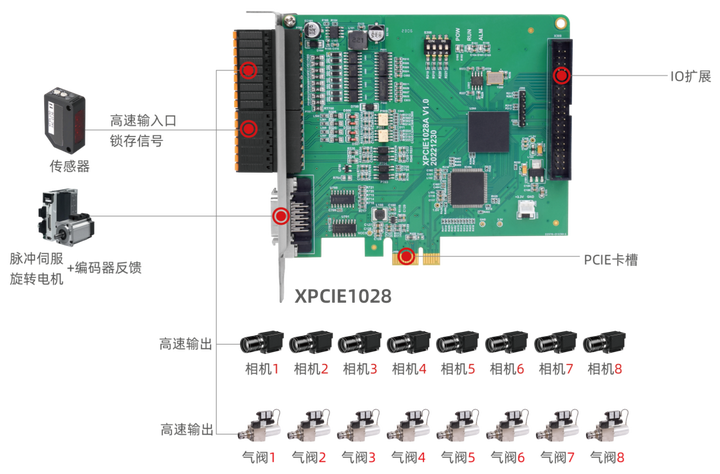 XPCIE1028正在光教挑选机上硬件计划1(8相机+8排料)
XPCIE1028正在光教挑选机上硬件计划1(8相机+8排料)
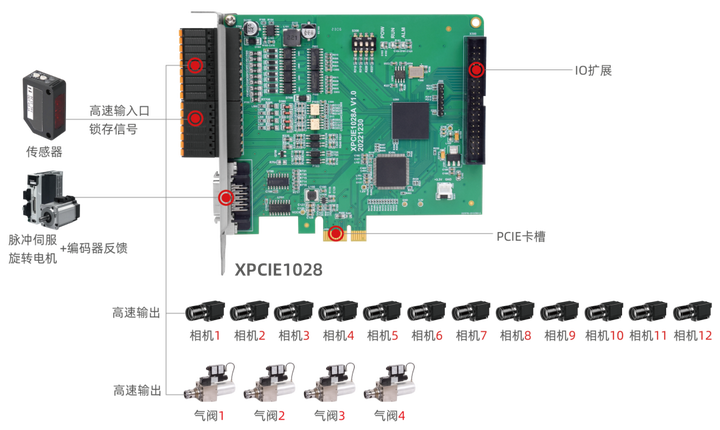 XPCIE1028正在光教挑选机上硬件计划2(12相机+4排料)
XPCIE1028正在光教挑选机上硬件计划2(12相机+4排料)
XPCIE1028硬件特征:
1.撑持电子凸轮、曲线插补等活动节制功用。
2.板载28+2面通用输出,32+2面通用输入,此中8路下速输出战16路下速输入。
3.板载4路脉冲输入,此中一起公用脉冲轴接心(好分脉冲输入+编码器反应)。
4.撑持8路下速锁存输出心,可记载转盘去料地位。
5.多达16路粗准输入、硬件地位比拟输入,机械视觉飞拍检测战挑选吹气下速输入,可依据需供分派。
XPCIe1028视频引见可面击→“【视觉挑选机公用卡】超下速PCle及时活动节制卡XPCIE1028 ,完成15000+pcs/分钟的IO触收检测速率!_哔哩哔哩_bilibili”检查。
更多闭于下速视觉挑选机计划概况面击“下速视觉挑选机PCI Express及时活动节制卡XPCIE1028”检查。
拱形活动
正在下速揭拆止业中,经常会有十分多的下速抬降、仄移、降落举措,惯例的曲脚门型活动正在曲角拐角处为了下降机台震惊,不能不停止加速中止,再从头减速的进程。
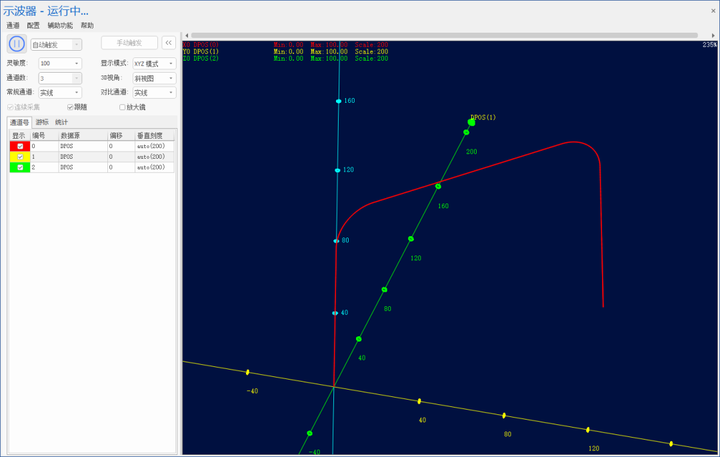
而拱形活动的长处正在于:将曲角拐直处的活动轨迹处置成圆弧轨迹,不只极年夜下降了加速水平,同时借包管了机台的波动性,和活动的延续性,进步了全体减工效力。
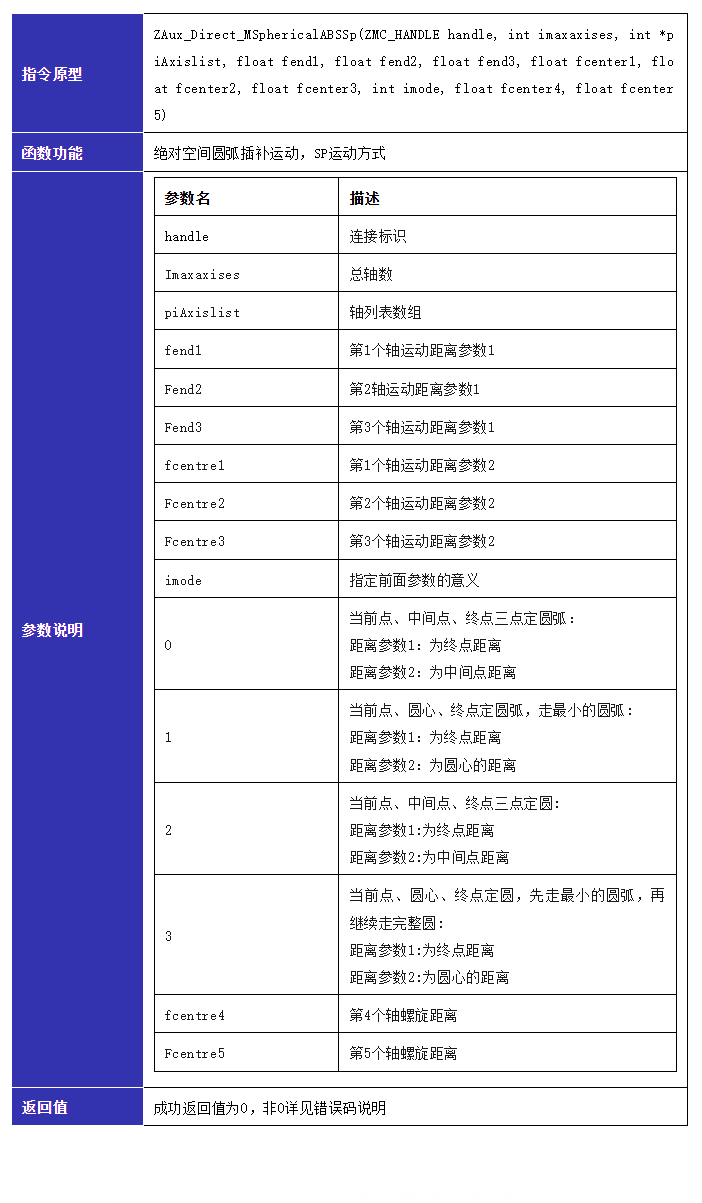
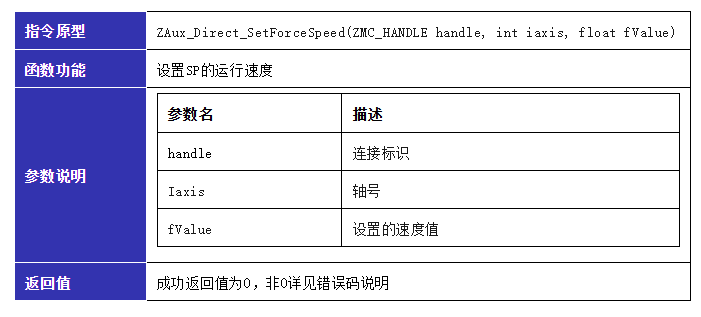
拱形活动相干指令
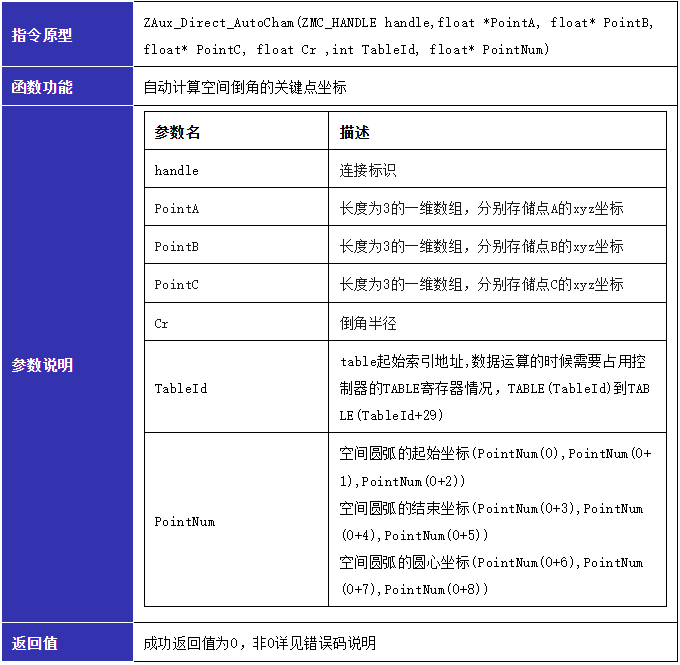
拱形活动完成道理
拱形活动完成是将本来的门型活动里抬降、仄移、降落三条曲线插补,脚动拆分红曲线、圆弧、曲线、圆弧、曲线五条插补活动,再用延续插补去包管速率的延续性,那需求我们事前晓得本门型活动的空间4面坐标,将曲角轨迹改成圆弧轨迹。
1.门型活动轨迹
2.拱形活动轨迹
C#开辟流程
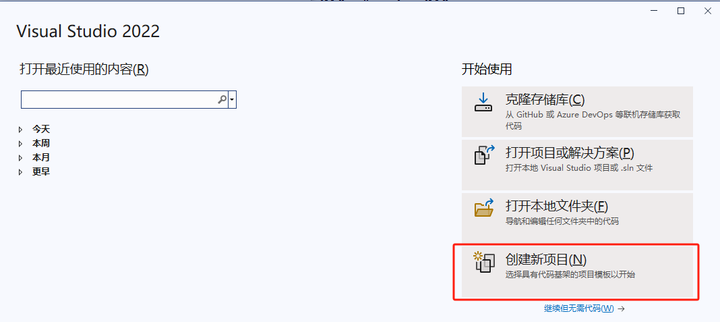
1.翻开Visual Studio 2022硬件挑选创立新项目。
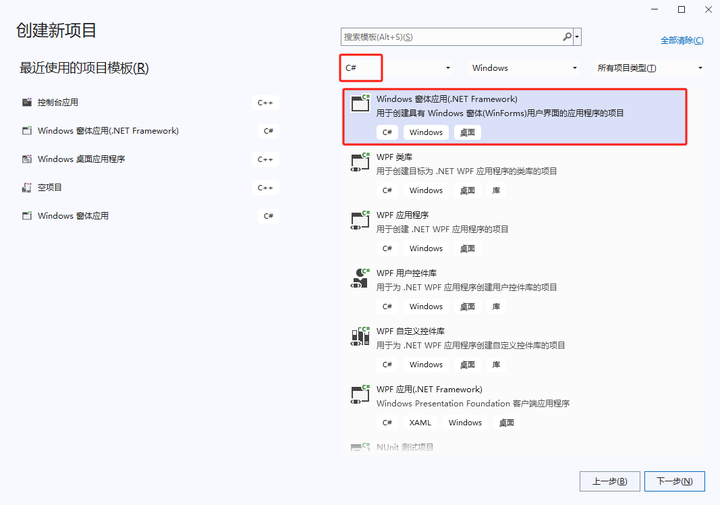
2.挑选开辟言语为“C#”战Windows窗体使用(.NET Framework)。
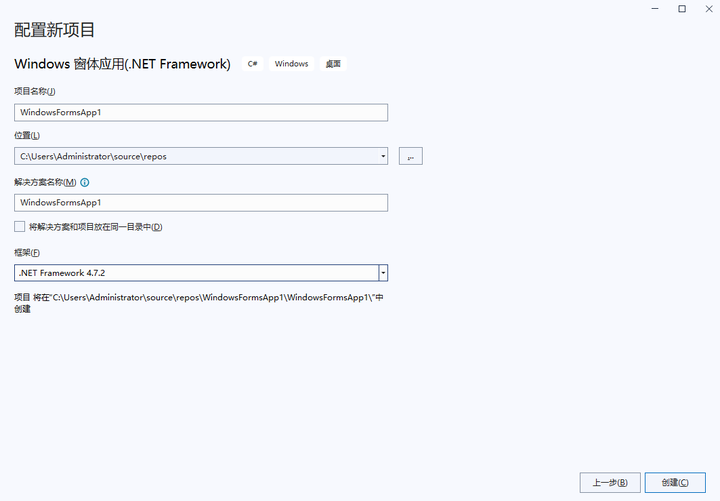
3.挑选项目称号、文件目次地位及框架。
4.将厂商供给的C#的库文件复造到新建的项目中。
(1)将Zmcaux.cs文件复造到新建的项目外面。
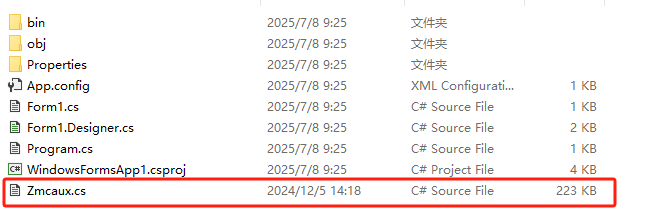
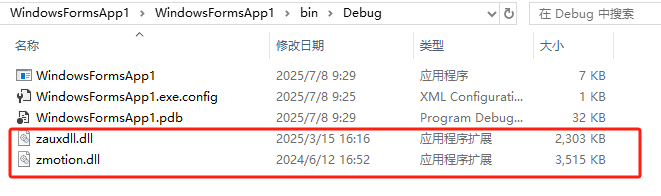
(2)将zauxdll.dll战zmotion.dll文件放进bindebug文件夹中。
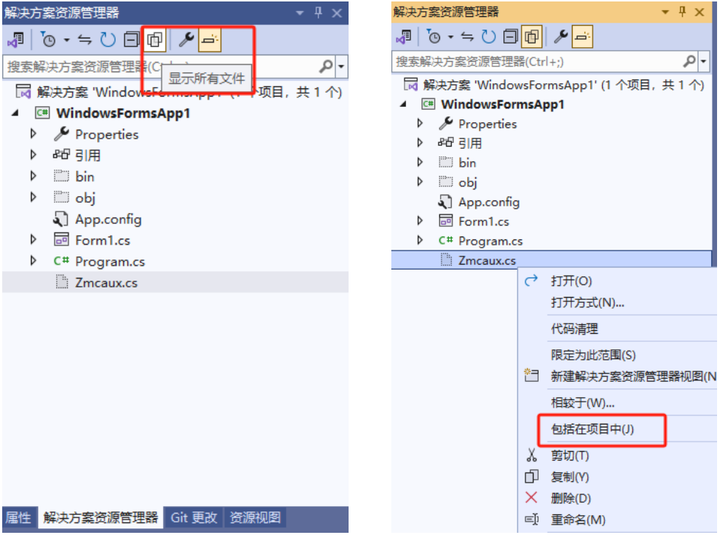
5.翻开新建的项目文件,正在左边的处理计划资本治理器中面击显现一切,然后鼠标左键面击Zmcaux.cs文件,面击包罗正在项目中。
6.进进Form1.cs代码编纂界里,写进using cszmcaux,并声明节制器句柄g_handle。
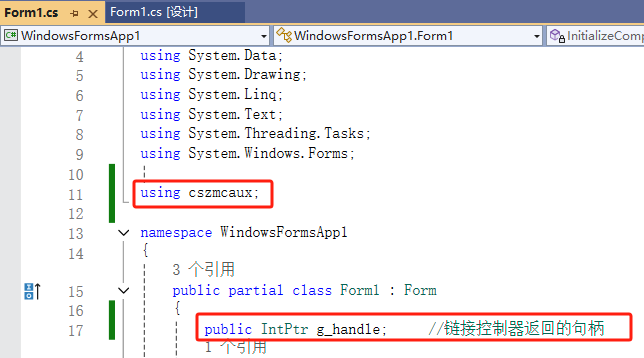
7.至此项目新建完成,能够停止C#项目开辟。
函数阐明
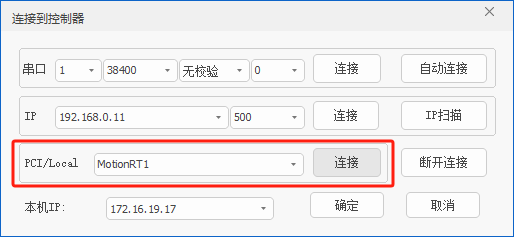
1.衔接节制器。
MotionRT750次要运用ZAux_FastOpen去获得衔接句柄,树立通信。
//LOCAL链接
private void Locallink_Click(object sender, EventArgs e)
{
if (g_handle != (IntPtr)0)
{
MessageBox.Show("MotionRT750已链接!", "提醒");
}
else
{
zmcaux.ZAux_FastOpen(5, "", 1000, out g_handle);
if (g_handle != (IntPtr)0)
{
MessageBox.Show("MotionRT750链接胜利!", "提醒");
timer1.Enabled = true;
this.Text = "MotionRT750已链接";
}
else
{
MessageBox.Show("节制器链接掉败,请反省RT750能否翻开!", "正告");
}
}
}
2.完成拱形活动
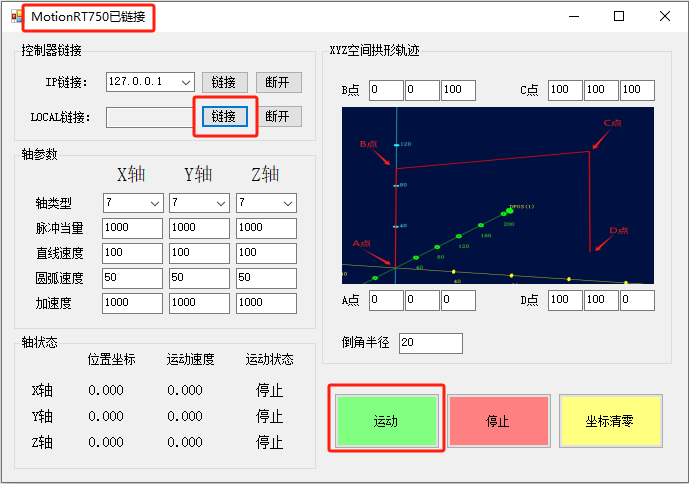
辨别设置拱形活动曲线段取圆弧段的速率参数,并翻开延续插补包管活动速率延续,再计较出两个曲线拐角转成圆弧的肇端面、圆心、完毕面坐标。
//活动轨迹A->B->C->D
float[] PointA = new float[3] { Convert.ToSingle(textBox20.Text), Convert.ToSingle(textBox21.Text), Convert.ToSingle(textBox22.Text) };
float[] PointB = new float[3] { Convert.ToSingle(textBox23.Text), Convert.ToSingle(textBox24.Text), Convert.ToSingle(textBox25.Text) };
float[] PointC = new float[3] { Convert.ToSingle(textBox26.Text), Convert.ToSingle(textBox27.Text), Convert.ToSingle(textBox28.Text) };
float[] PointD = new float[3] { Convert.ToSingle(textBox29.Text), Convert.ToSingle(textBox30.Text), Convert.ToSingle(textBox31.Text) };
//空间圆弧 肇端面,完毕面,圆心的坐标
float[] PointNum = new float[9];
//暂时数据
float[] TempPosData = new float[3];
//曲线段速率战圆弧段速率
float LineSpeed = Convert.ToSingle(textBox5.Text);
float CrSpeed = Convert.ToSingle(textBox8.Text);
float Cr = Convert.ToSingle(textBox45.Text);
//设置曲线段速率
zmcaux.ZAux_Direct_SetSpeed(g_handle, AxisList[0], LineSpeed);
//翻开延续插补
zmcaux.ZAux_Direct_SetMerge(g_handle, AxisList[0], 1);
//活动到A面
zmcaux.ZAux_Direct_MoveAbs(g_handle, 3, AxisList, PointA);
//计较拐角1的相干数据
ZAux_Direct_AutoCham(g_handle, PointA, PointB, PointC, Cr, 100, PointNum);
//活动到拐角1的空间圆弧的终点
TempPosData[0] = PointNum[0];
TempPosData[1] = PointNum[1];
TempPosData[2] = PointNum[2];
zmcaux.ZAux_Direct_MoveAbs(g_handle, 3, AxisList, TempPosData);
//设置空间圆弧的肇端速率,限定速率,完毕速率
zmcaux.ZAux_Direct_SetStartMoveSpeed(g_handle, AxisList[0], CrSpeed);
zmcaux.ZAux_Direct_SetEndMoveSpeed(g_handle, AxisList[0], CrSpeed);
zmcaux.ZAux_Direct_SetForceSpeed(g_handle, AxisList[0], CrSpeed);
//开端拐角1
zmcaux.ZAux_Direct_MSphericalABSSp(g_handle, 3, AxisList, PointNum[3], PointNum[4], PointNum[5], PointNum[6], PointNum[7], PointNum[8], 1, 0, 0);
//计较拐角2的相干数据
ZAux_Direct_AutoCham(g_handle, PointB, PointC, PointD, Cr, 100, PointNum);
//活动到拐角2的空间圆弧的终点
TempPosData[0] = PointNum[0];
TempPosData[1] = PointNum[1];
TempPosData[2] = PointNum[2];
zmcaux.ZAux_Direct_MoveAbs(g_handle, 3, AxisList, TempPosData);
//设置空间圆弧的肇端速率,限定速率,完毕速率
zmcaux.ZAux_Direct_SetStartMoveSpeed(g_handle, AxisList[0], CrSpeed);
zmcaux.ZAux_Direct_SetEndMoveSpeed(g_handle, AxisList[0], CrSpeed);
zmcaux.ZAux_Direct_SetForceSpeed(g_handle, AxisList[0], CrSpeed);
//开端拐角2
zmcaux.ZAux_Direct_MSphericalABSSp(g_handle, 3, AxisList, PointNum[3], PointNum[4], PointNum[5], PointNum[6], PointNum[7], PointNum[8], 1, 0, 0);
//活动到D面
zmcaux.ZAux_Direct_MoveAbs(g_handle, 3, AxisList, PointD);
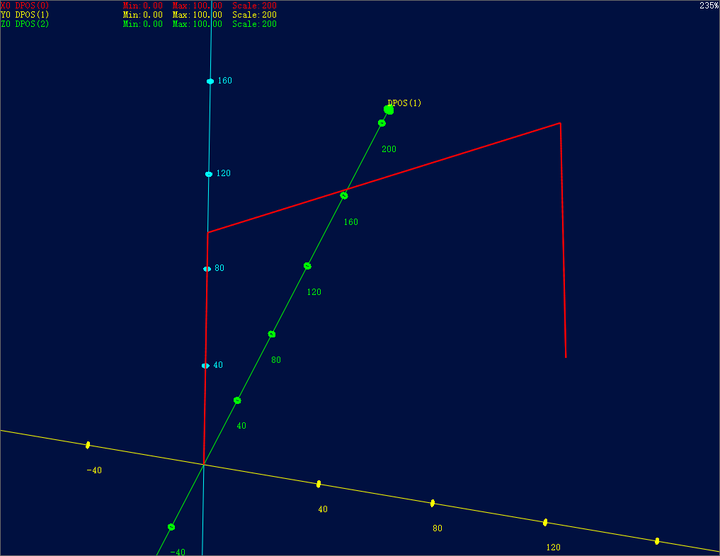
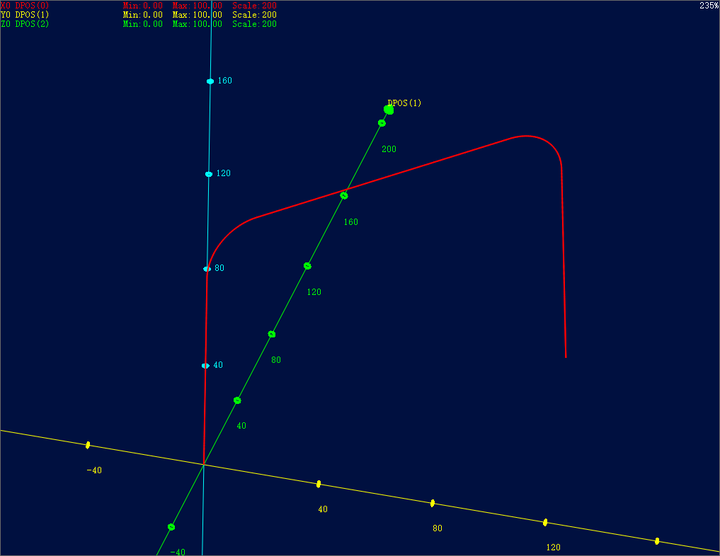
翻开RTSys硬件示波器察看轨迹
1.翻开【RTSys】硬件,面击【PCI/Local】的【衔接】通信上MotionRT750。

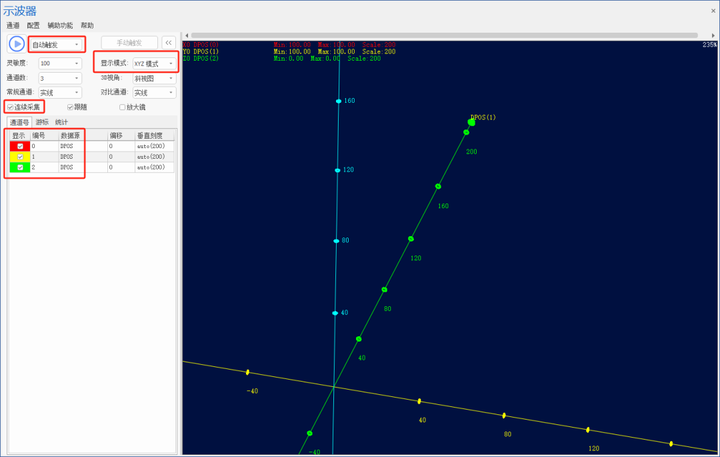
2.翻开【示波器】东西。

3.设置示波器参数。数据源挑选【DPOS】,编号挑选对应的【轴号】,完成【显现】,显现形式挑选【XYZ形式】,勾选【延续收集】,触收形式挑选【主动触收】,然后面击【启动】按钮。
4.翻开C#例程,衔接【链接】,再面击【活动】履行拱形活动,察看示波器轨迹。
讲授视频可面击→“强及时活动节制内核MotionRT750(四):下速揭拆使用中的拱形活动_哔哩哔哩_bilibili”检查。
完好代码获得地点
▼
本次,正活动手艺强及时活动节制内核MotionRT750(四):下速揭拆使用中的拱形活动,便分享到那里。
更多出色内容请存眷“正活动小助脚”大众号,需求相干开辟情况取例程代码,请征询正活动手艺发卖工程师:400-089-8936。
本文由正活动手艺本创,欢送大师转载,配合进修,一同进步中国智能造制程度。文章版权回正活动手艺一切,若有转载请说明文章来历。
考核编纂 黄宇
